信息來源:安全內(nèi)參
英國無人空天信息網(wǎng)站2022年6月1日報道����,歐洲執(zhí)法技術(shù)服務(wù)網(wǎng)絡(luò)(ENLETS)發(fā)布了《ENLETS反無人機系統(tǒng)》最終報告。該報告由歐盟內(nèi)部安全基金資助撰寫���,對反無人機系統(tǒng)技術(shù)興趣小組自2020年12月起所開展的活動進行了總結(jié)����。
圖 SEWIP Block 3 系統(tǒng)渲染圖
一��、背景分析
歐洲國家一直在尋找適當?shù)姆椒☉?yīng)對本國面臨的無人機威脅�,當前各國面臨的主要挑戰(zhàn)是可適應(yīng)城市環(huán)境的反無人機技術(shù)。因為大多數(shù)探測和擊敗無人機的技術(shù)解決方案在開放區(qū)域運行情況良好�����,但在城市和高層建筑等環(huán)境中的效果不佳�����。
二�、ENLETS及技術(shù)興趣小組簡介
歐洲執(zhí)法技術(shù)服務(wù)網(wǎng)絡(luò)成立于2008年,是執(zhí)法工作組的一個小組���,也是此前無人機技術(shù)興趣小組的延續(xù)�,向行動協(xié)調(diào)和內(nèi)部安全常設(shè)委員會報告工作情況,其主要目標是在執(zhí)法機構(gòu)和創(chuàng)新技術(shù)之間建立緊密聯(lián)系����。ENLETS的工作重點是使其工作專業(yè)化,并與學(xué)術(shù)界�、安全機構(gòu)和其他網(wǎng)絡(luò)建立可持續(xù)性的強有力聯(lián)盟。
三�、報告主要內(nèi)容
01 反無人機術(shù)語
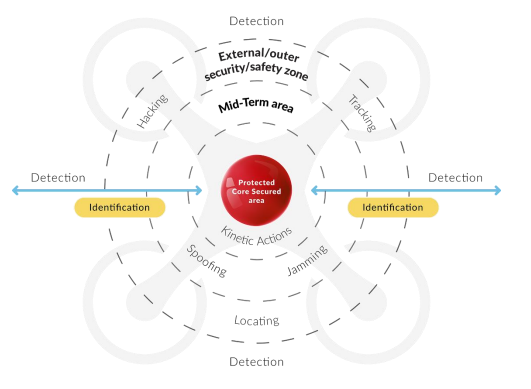
反無人機操作過程分為三個主要方面:一是整個無人機飛行系統(tǒng)的探測和跟蹤;二是基于飛行方向或外部安全����、安保區(qū)域等的異常行為,需澄清無人機飛行目的�、識別和驗證;三是預(yù)估不同行動的安全����、安保區(qū)域,并評估外部�����、中距離和受保護核心區(qū)域的安全����、安保區(qū)域的大小��。
02 反無人機系統(tǒng)技術(shù)興趣小組的研究發(fā)現(xiàn)
1. 當前在反無人機領(lǐng)域面臨的挑戰(zhàn)
-
能至少掌握5公里外空域的態(tài)勢運行情況
-
最大的技術(shù)挑戰(zhàn)是如何識別�����、破壞或控制特定“敵方”無人機
-
反無人機技術(shù)昂貴����,一些國家無特種反無人機技術(shù)
-
反無人機技術(shù)覆蓋范圍小
-
干擾技術(shù)受國家法律和嚴格的頻率限制
-
反無人機能力測試的標準化(測試演示通常在開放環(huán)境中進行�,在城市環(huán)境中測試則充滿挑戰(zhàn))
-
如何應(yīng)對小型且快速的非合作無人機
-
如何接管無人機指揮鏈路
-
確保使用電子圍欄技術(shù)時不會干擾GNSS信號
-
基于4G��、5G和下一代通信的無人機
-
反無人機技術(shù)的標準化及認證(所有反無人機技術(shù)都需要在執(zhí)法機構(gòu)評估其效率之前進行測試)
-
不宜過多依賴軍事技術(shù)的支援來開展反無人機監(jiān)測
2.反無人機系統(tǒng)技術(shù)興趣小組的研究發(fā)現(xiàn)
反無人機需要來自工業(yè)���、研究�、執(zhí)法�、網(wǎng)絡(luò)等方面的大量合作。目前各類探測系統(tǒng)需要一個可比較的觀察系統(tǒng)來相互支持�,以幫助獲得最佳探測結(jié)果。執(zhí)法機構(gòu)需要找到可就地構(gòu)建并快速移動的解決方案��,關(guān)鍵是擁有能夠快速提取具有危險行為物品的設(shè)備����。
城市環(huán)境對反無人機措施的挑戰(zhàn)。各家供應(yīng)商向執(zhí)法機構(gòu)展示設(shè)備時通常是在開闊地帶,因此�����,為確保執(zhí)法部門快速獲得滿足操作環(huán)境基本要求的設(shè)備及相關(guān)信息�,需要為運營商定義執(zhí)法機構(gòu)所需反無人機系統(tǒng)的具體要求和標準,以確保反無人機設(shè)備可在城市環(huán)境下正常工作�。




